First - the plugs:
support some repeaters financially, or with donations of equipment, or by connecting an existing repeater to the Pride Network
Buy some cool stuff to support my passion projects!
Ponzu Launch Report
Hey folx! We had a very successful launch of Ponzu (Radio Rocket v3) on June 13th!
The first week after school lets out each year we do “Daddy Camp” which is basically a week of backyard camping and summer camp type activities - one of the mornings was set aside for Rocket launching, so we launched 7 rockets, including Ponzu, and it was a smashing success!
First, the details on Ponzu for this flight:
Height: 109.86cm ; 43.25”
Diameter: 41.6mm ; 1.64” (BT-60 sized tube)
Launch Weight, w/o Motor: 487g ; 17.18oz
Recovery: 30” parachute
Paint: Gold on the bottom 2/3, fading to blue with a spattered fade
Telemetry: Magnetometer, gyro, acceleration, barometric pressure, altitude, and messaging via LoRa on 434MHz.
Motor: G53FJ, 9 Second Ejection Delay
Launch Weight:634g ; 22oz
Altitude: 588.92m ; 1929ft
Max Velocity: 324kph ; 201mph
Max Acceleration: 179m/s^2 ; 18g (641.02m/s^2 ; 65g at parachute deployment)
Flight Time: 132s
This was our most impressive radio rocket flight to-date, in pretty much all regards - fastest speeds and highest altitude due to the new rocket and electronics design, AND the rocket was successfully recovered! There were only a couple things that went ‘wrong’ during this launch, which I’ll detail in a bit, but first, let’s do the exciting bit - launch videos!
Ponzu (Radio Rocket v3) Launch Video
All Launches From the Session
Retrospective & Lessons Learned
As I tend to do for these launch reports, I’m just going to throw down the bullets of what we learned/things we might change for the future etc.
-
I had my laptop along to let the very youngest watch some Daniel Tiger during the setup etc. between launches. That went a long way towards keeping the tiniest members of the flight crew from going feral on us during the session:-)
-
We forgot our magnet to turn on Ponzu’s payload from outside the rocket, so we had to do a weird half-disassembly maneuver while the rocket was on the rail, to push the internal power button. It worked, but for the future we’re going to buy a bunch of big magnets on sticks to keep in the box, in my office, in the car, etc. so that we don’t have just 1, and leave it behind somewhere. The kid have some of these (associate link) at their school that they use for some lessons. They are nice and chunky and hard to loose, so we’ll probably order a package of these to have around in some strategic places.

-
We need to fiddle with the colors on the ground station’s touch screen to try to get maximum visibility outdoors. The current colors were a scheme that are considered high contrast, but outside it was still a little hard to see. I may need to just take it out in the back yard on a sunny day and play with colors till I find a combo that works well.
-
We need to tweak the code that generates the ‘velocity’ portion of the data. You may have noticed the dashboard didn’t show any velocity data on the velocity gauges - that is partially because I used units (cm/millisecond) in the code that turned out to not be quite granular enough. I’m updating that code to measure in mm/millisecond which gives more granularity/precision. I use weird units like that in the code, so that I can use integers in all the calculations (which the microcontroller can do faster), and the multiply up/divide down to more standard units in the dashboards for final display.
-
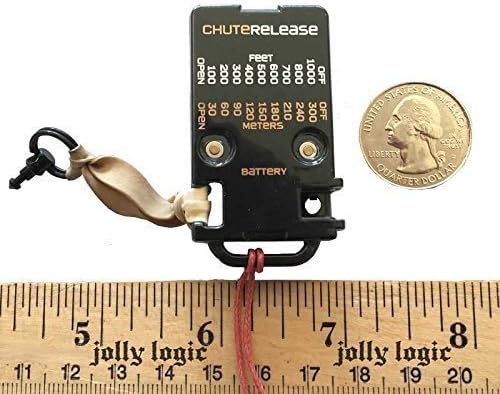
We had a much longer walk than planned - the rocket actually landed one farm over from our launch site, but luckily it was a farm where I know the farmer because we have kids the same age, and talk regularly enough that I was comfortable flagging him down in his field so that we could hike out through the hay he was raking to retrieve the rocket. Since we’re flying higher now, I probably need to invest in a Chute Release device (associate link). These slick little things basically use a rubber band wrapped around the parachute, to keep the parachute reefed when it deploys, so that the rocket will fall faster down to a set altitude before releasing the band and allowing the parachute to unfurl. This keeps the rocket from drifting too far during it’s descent.
-
For part of the ascent we didn’t get any telemetry (you can see several seconds in the video where no telemetry is received.) For now I’m going to blame that on our temporary antenna situation with the new ground station. Since the new ground station isn’t quite complete, the antenna was just sort of thrown on the table dangling from it’s little coax jumper, instead of being mounted. We may even switch to an egg-beater or even a directional antenna mounted via the mast-holder that we put on the side of the ground station box.
-
I think we’ll add 2 meter APRS back into our next flight. Luckily visibility was good, but we were high enough that we could have easily lost sight of the rocket, making it hard to find without some location tracking.
-
OR we may look into LoRa APRS - that’s a thing now, and since we already have LoRa on-board, if it isn’t too difficult burping out periodic LoRa APRS packets might help us keep the weight down instead of adding an additional device. That will be pretty contingent though on the infrastructure around here - I’m not sure how many, if any, LoRa igates or digipeaters are around my area.
-
I want to get our AREDN setup finalized, so that we can ‘send our data home’ via AREDN, and then do the live tooting and site updates from our home internet connection, based on the data received through the AREDN devices.
-
We’ll be ready to finish/tidy up the back panels etc. of the new ground station now that we know everything works pretty well.
-
We’ve got some options for adding on-board cameras laying around here, so we’ll try to work on that for some of the upcoming launches. We have a couple little ‘dongle’ cameras that we could attach, and I’ve also dabbled with ESP32 cams, so this could end up being either a recording that we retrieve later, or a live stream of video during the launch itself (or both?!)
-
Video, screen-grabs, helpers, etc. rocket flights are so short, that having lots of video, screen grabs, etc. helps when reviewing stuff post launch. I might try to rope in some more helpers, and more devices, in the future, to try and capture more video, dashboard stuff etc.
-
Dashboard playback - after this flight I whipped up a python script that will basically “play back” the telemetry data, so I can tweak up the dashboard and stuff and test with real-time data now, for future updates.
-
Max Acceleration data - The max acceleration recorded was actually at parachute deployment - I may tweak the code so that it shows “Max acceleration during ascent” since that’s what we’re after more than what the sensors read when the rocket blows its sections apart for recovery deployment.
-
Radio Rocket v4? I may start ‘building’ another series of radio rockets in parallel to the continued work on v3 and future iterations of the Radio Rocket. I’m thinking something along the lines of a “Radio-Rocket-Lite.” A lot of people have been interested in this project, and I’d like to do a much more simplistic version where I can put together a step-by-step of; go buy X rocket kit, X tracker, connect it to a battery, load X firmware, and go launch it!
Wrap up
This will wrap up this post for now, but I may come back and edit it, or write a follow up, as I continue analyzing the data. I’ll have some charts and such to share, which are always fun too!